مستشعر U4500 MEMS IMU AHRS INS تكتيكي عالي الجودة للطائرات بدون طيار والروبوتات البحرية

تتكون أجهزة الاستشعار من سلسلة U4500 من أنظمة IMU/VRU/MRU/AHRS/INS عالية الأداء من الدرجة التكتيكية المصممة بتقنية MEMS-IMU، وهي مجهزة بخوارزميات ترشيح كالمان الموسع التكيفي المطورة بشكل مستقل، وخوارزميات تحليل ديناميكيات ضوضاء IMU، وخوارزميات تقدير الارتفاع، وخوارزميات تحليل حالة حركة الحامل، وخوارزميات دمج GNSS، والتي يمكن أن توفر للمستخدمين معلومات دقيقة عن الموقع والاتجاه والسرعة وغيرها من المعلومات.
تقوم مستشعرات سلسلة U4500 بنقل البيانات عبر واجهات UART/CAN وتتميز بإمكانيات تكوين متقدمة للمستخدم. (يلزم توصيل جهاز إرسال واستقبال خارجي لبروتوكول CAN).
يمكن لسلسلة U4500 التزامن مع النظام من خلال التشغيل الخارجي، ويمكنها استقبال توقيت UTC، ويمكنها أيضًا مواءمة الوقت مع الأنظمة الخارجية مثل أجهزة الرادار والكاميرات من خلال وظيفة الإخراج المتزامن.
يمكن لجهاز كمبيوتر علوي متعدد الوظائف (واجهة المستخدم الرسومية) أن يساعد في تقييم المنتج بسرعة، وتشمل هذه الوظائف على سبيل المثال لا الحصر تكوين الوحدة النمطية، وعرض البيانات، وترقية البرامج الثابتة، وتسجيل البيانات، وما إلى ذلك.
رقم القطعة، :
U4500الطلب (الحد الأدنى للكمية) :
1سلسلة المنتجات والمعايير
| معلمات الاندماج | حالة | U4500-A | U4500-B | U4500-C | U4500-D | وحدة |
| (الميل / الدوران) ① | 0.05 (اسمي)، 0.1 (كحد أقصى) | ° | ||||
| دقة | 0.01 | ° | ||||
| العنوان (VRU/MRU) )① | 0.2 (اسمي)، 0.3 (كحد أقصى) | ° | ||||
| العنوان (AHRS) 2 | 0.5 (اسمي)، 2 (كحد أقصى) | |||||
| دقة | 0.01 | |||||
| وقت البدء | الوحدة البحرية الدولية/VRU | 2 | s | |||
| MRU (ثابت) | 60 | |||||
| MRU (بحر) | 180 | |||||
| هيف | / | 5/5% (اسمي) | cm | |||
| فترة الرفع | 1~10 (اسمي) | s | ||||
| ملحوظات: ①: اختبار دوران القرص الدوار. ②: يتم القياس في ظل شرط عدم وجود تداخل في المجال المغناطيسي حول المنتج بعد المعايرة المغناطيسية الأرضية، ويجب ضبط المنتج على وضع AHRS. |
||||||
| جيروسكوب | حالة | U4500-A | U4500-B | U4500-C | U4500-D | وحدة |
| نطاق القياس | ±300 | °/s | ||||
| دقة | 16 | قليل | ||||
| الخطأ الخطي ① | 300 درجة مئوية/ثانية -40 درجة مئوية -110 درجة مئوية 100 درجة مئوية/ثانية -40 درجة مئوية -110 درجة مئوية |
±0.15 (اسمي)، ±0.3 (أقصى) | °/s | |||
| خطأ المحور المتقاطع | ±0.15 (كحد أقصى) | % | ||||
| عرض نطاق ترددي 3 ديسيبل | 235 (اسمياً)، 250 (كحد أقصى) | Hz | ||||
| معدل أخذ العينات | 1000 | Hz | ||||
| كثافة الضوضاء | XY: 0.0004 Z: 0.0006 |
(°/ثانية)/√هرتز | ||||
| عدم استقرار الانحياز الصفري ② | تباين ألان | 0.3 | °/ساعة، 1σ | |||
| استقرار الانحياز الصفري | 10 ثوانٍ سلسة | 0.5 | °/ساعة، 1σ | |||
| قابلية التكرار بدون انحياز | 0.8 | °/ساعة، 1σ | ||||
| المشي العشوائي بزاوية ③ | تباين ألان | XY: 0.015 Z: 0.025 |
°/√Hz، 1σ | |||
| درجة حرارة كاملة بدون انحياز | -40-85 درجة مئوية | XY: 0.25 (كحد أقصى) Z: 0.01 (اسمي)، 0.03 (أقصى) |
°/s | |||
| حساسية مقياس التسارع | لإدخال الجاذبية الثابتة | 0.00075 | °/s/g | |||
| ملحوظات: ①: الخطأ الخطي هو أقصى انحراف في نطاق محدد عن خط أفضل ملاءمة تم تحديده بواسطة القيم المقاسة. ٢: القيمة التي تم الحصول عليها بقسمة الحد الأدنى لقيمة تباين ألان على ٠.٦٦٤. أثناء القياس، يتم استخدام إعداد مرشح تمرير منخفض بتردد ١٣ هرتز ومعدل أخذ عينات ٢٠٠ هرتز، ويجب أن يكون هناك وقت استقرار لمدة ١٥ دقيقة قبل بدء جمع البيانات لضمان الاستقرار الحراري الكامل. ③: المشي العشوائي الزاوي هو مصطلح ضوضاء بيضاء يتم تقديره من انحراف ألان عند ثابت زمني τ = 1 ثانية. |
||||||
| مقياس التسارع | حالة | U4500-A | U4500-B | U4500-C | U4500-D | وحدة |
| نطاق القياس | ±16 | g | ||||
| دقة | 16 | قليل | ||||
| انحياز أولي صفري | 2 | mg | ||||
| الخطأ الخطي ① | 8 غرام -40 درجة مئوية -110 درجة مئوية | ±3 (اسمي)، ±15 (كحد أقصى) | mg | |||
| 1 غرام -40 درجة مئوية -110 درجة مئوية | ||||||
| خطأ المحور المتقاطع | ±0.15 (كحد أقصى) | % | ||||
| عرض نطاق ترددي 3 ديسيبل | 210 (اسمي)، 235 (كحد أقصى) | Hz | ||||
| معدل أخذ العينات | 1000 | Hz | ||||
| كثافة الضوضاء | 0.0008 | م/ث²/√هرتز، 1σ | ||||
| عدم استقرار الانحياز الصفري ② | تباين ألان | 0.01 | mg | |||
| استقرار الانحياز الصفري | 10 ثوانٍ سلسة | 0.03 | mg | |||
| قابلية التكرار بدون انحياز | 0.04 | mg | ||||
| المشي العشوائي بزاوية ③ | تباين ألان | 0.03 | م/ث√س، 1σ | |||
| درجة حرارة كاملة بدون انحياز | -40-85 درجة مئوية | 0.5 (اسمي)، 2 (كحد أقصى) | mg | |||
| ملحوظات: ①: الخطأ الخطي هو أقصى انحراف في نطاق محدد عن خط أفضل ملاءمة تم تحديده بواسطة القيم المقاسة. ٢: القيمة التي تم الحصول عليها بقسمة الحد الأدنى لقيمة تباين ألان على ٠.٦٦٤. أثناء القياس، يتم استخدام إعداد مرشح تمرير منخفض بتردد ١٣ هرتز ومعدل أخذ عينات ٢٠٠ هرتز، ويجب أن يكون هناك وقت استقرار لمدة ١٥ دقيقة قبل بدء جمع البيانات لضمان الاستقرار الحراري الكامل. ③: المشي العشوائي الزاوي هو مصطلح ضوضاء بيضاء يتم تقديره من انحراف ألان عند ثابت زمني τ = 1 ثانية. |
||||||
| مقياس المغناطيسية | حالة | U4500-A | U4500-B | U4500-C | U4500-D | وحدة |
| يتراوح | / | ±20 | جاوس | |||
| ضوضاء | / | 450 | nT | |||
| الخطية | / | 20 | uT | |||
| مستشعر درجة الحرارة | حالة | U4500-A | U4500-B | U4500-C | U4500-D | وحدة |
| يتراوح | -40 – 135 | ℃ | ||||
| خطأ الإزاحة | ±1 | ℃ | ||||
| مقياس الضغط الجوي | حالة | U4500-A | U4500-B | U4500-C | U4500-D | وحدة |
| يتراوح | / | 300 ~ 1200 | هيكتوباسكال | |||
| دقة | / | 0.006 | هيكتوباسكال | |||
| دقة | / | ±0.06 | هيكتوباسكال | |||
| الميكانيكا/البيئة | حالة | U4500-A | U4500-B | U4500-C | U4500-D | وحدة |
| مصدر الطاقة VDD | 3.6 - 5.5 | V | ||||
| استهلاك الطاقة | 370 (كحد أقصى) | mW | ||||
| المجلد | 0.4 (كحد أقصى) | V | ||||
| VOH | 2.6 (دقيقة) | V | ||||
| فيل | -0.3 (الحد الأدنى)، 1 (الحد الأقصى) | V | ||||
| فيروس نقص المناعة البشرية | 1.9 (كحد أدنى)، 3.6 (كحد أقصى) | V | ||||
| درجة حرارة التشغيل | -125 | ℃ | ||||
| درجة حرارة التخزين | -165 | ℃ | ||||
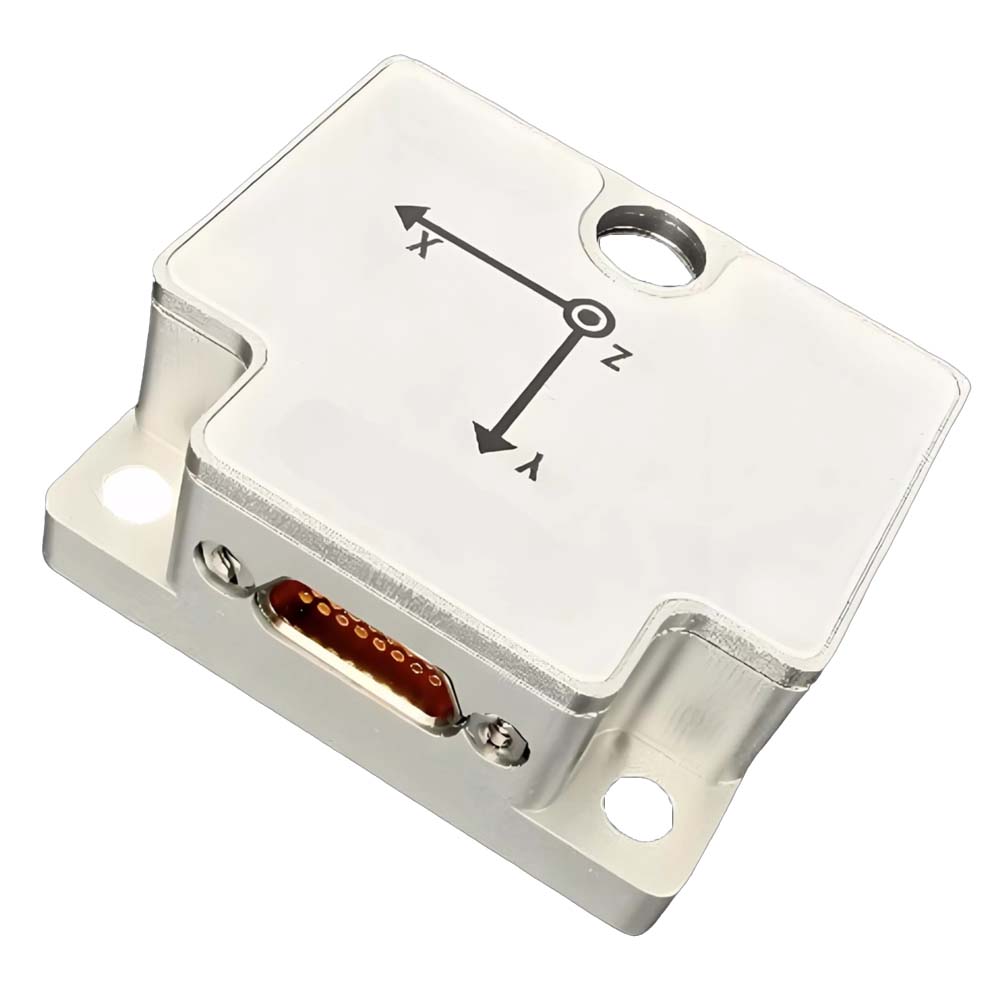
| الأبعاد | 24x24x14 | mm | ||||
| مادة الغلاف وعملية تصنيعه | سبائك الألومنيوم المصنعة باستخدام تقنية CNC | |||||
| حماية البيئة | توجيه RoHS 2011/65/EU | |||||
| التوافق الكهرومغناطيسي | توجيه LVD 2014/35/EU | |||||
| اختبار السقوط | السقوط الحر ثلاث مرات على منصة تجريبية بارتفاع 75 سم | |||||
| صدمة حرارية | ارفع درجة الحرارة من -40 إلى 85 درجة مئوية خلال ساعة واحدة، 5 مرات | |||||
| متوسط الوقت بين الأعطال | 30000 | h | ||||
| تأثير ميكانيكي | 10000 | g | ||||
| ESD HBM | 2 كيلو فولت | JEDEC/ESDA JS-001 | ||||
| واجهة المستخدم | حالة | مين | طبيعي | الأعلى | وحدة | |
| UART1/UART2 UART3 يستطيع |
معدل الباود | 9600 | 115200 | 921600 | bps | |
| وضع البداية | 0 | 100 | 1000 | Hz | ||
| 115200 | bps | |||||
| معدل الباود | 125 | 500 | 1000 | كيلوبت في الثانية | ||
| معدل الإطارات الناتج | 0 | 100 | 200 | Hz |
عملية الإنتاج
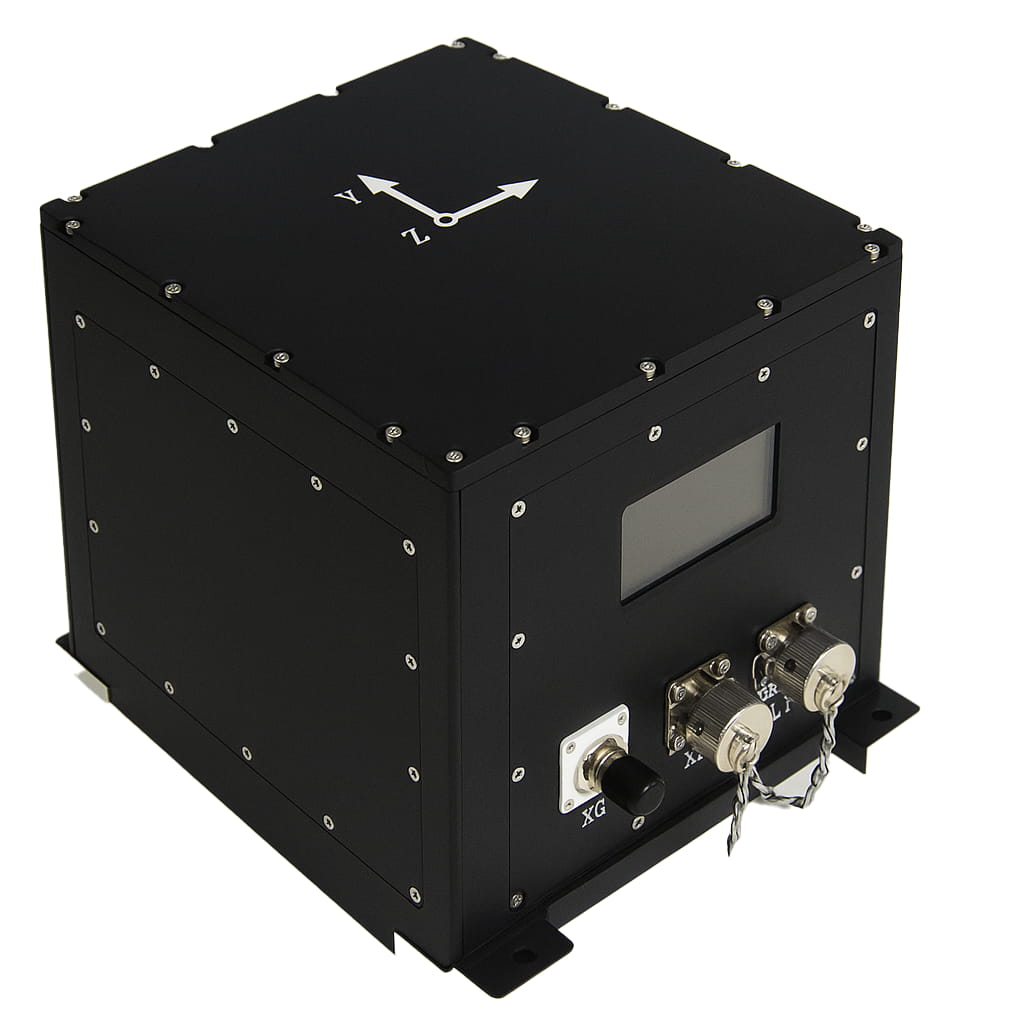
أبعاد المنتج

سيناريوهات التطبيق



التعليمات
1. ما هو استخدام جهاز U4500؟
U4500 هو مستشعر MEMS IMU / VRU / MRU / AHRS / INS من الدرجة التكتيكية مصمم لمرجعية وضعية الطائرات بدون طيار، والروبوتات غير المأهولة منخفضة السرعة، والأجهزة تحت الأرض، والتعويض النشط للأمواج، والتحكم في وضعية السفن، وتحديد المواقع الديناميكي، وتثبيت المنصات، وآلات البناء.
2. ما هي المنافذ التي يدعمها جهاز U4500؟
يدعم جهاز U4500 واجهات UART وCAN. ويتطلب استخدام ناقل CAN جهاز إرسال واستقبال CAN خارجي.
3. ما هي الوظائف التي يمكن أن يوفرها جهاز U4500؟
يدمج جهاز U4500 وظائف متعددة تشمل IMU وVRU وMRU وAHRS وINS. ويمكنه إخراج التسارع والسرعة الزاوية والمجال المغناطيسي الأرضي وضغط الهواء وزوايا أويلر والرباعيات والارتفاع، وعند الاتصال بنظام GNSS خارجي، فإنه يوفر معلومات عن الموقع والسرعة والاتجاه والتوقيت.














Xml سياسة الخصوصية مدونة خريطة الموقع
حقوق الطبع والنشر @ شركة مايكرو ماجيك جميع الحقوق محفوظة.
 الشبكة المدعومة
الشبكة المدعومة



 بالعربية
بالعربية