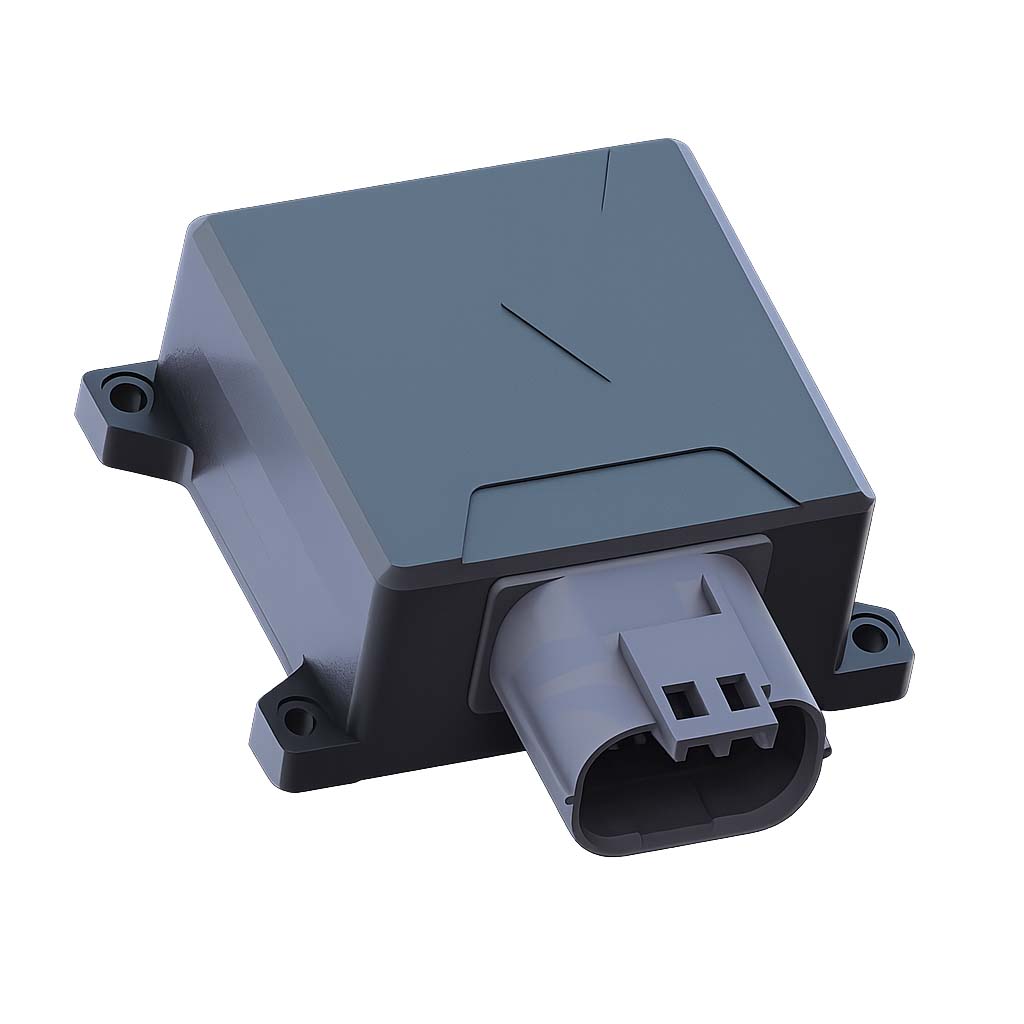
مستشعر U4200 عالي الدقة من نوع MEMS IMU AHRS التكتيكي للطائرات بدون طيار والروبوتات
سلسلة U4200 عبارة عن مستشعر IMU/VRU/AHRS يتكون من وحدة قياس بالقصور الذاتي (IMU) ومقياس مغناطيسي من فئة MEMS عالية الدقة. وهي مزودة بخوارزمية ترشيح كالمان الموسعة التكيفية المطورة بشكل مستقل، وخوارزمية تحليل ديناميكي لضوضاء وحدة قياس القصور الذاتي، وخوارزمية تحليل حالة حركة الحامل، مما يضمن دقة زوايا الوضع في ظل ظروف ديناميكية عالية ويقلل من انحراف زوايا الاتجاه.
يخضع كل مستشعر لتعويض دقيق قبل مغادرة المصنع، بما في ذلك درجة الحرارة، والتحيز الصفري، وعامل المقياس، والمحور المتقاطع.
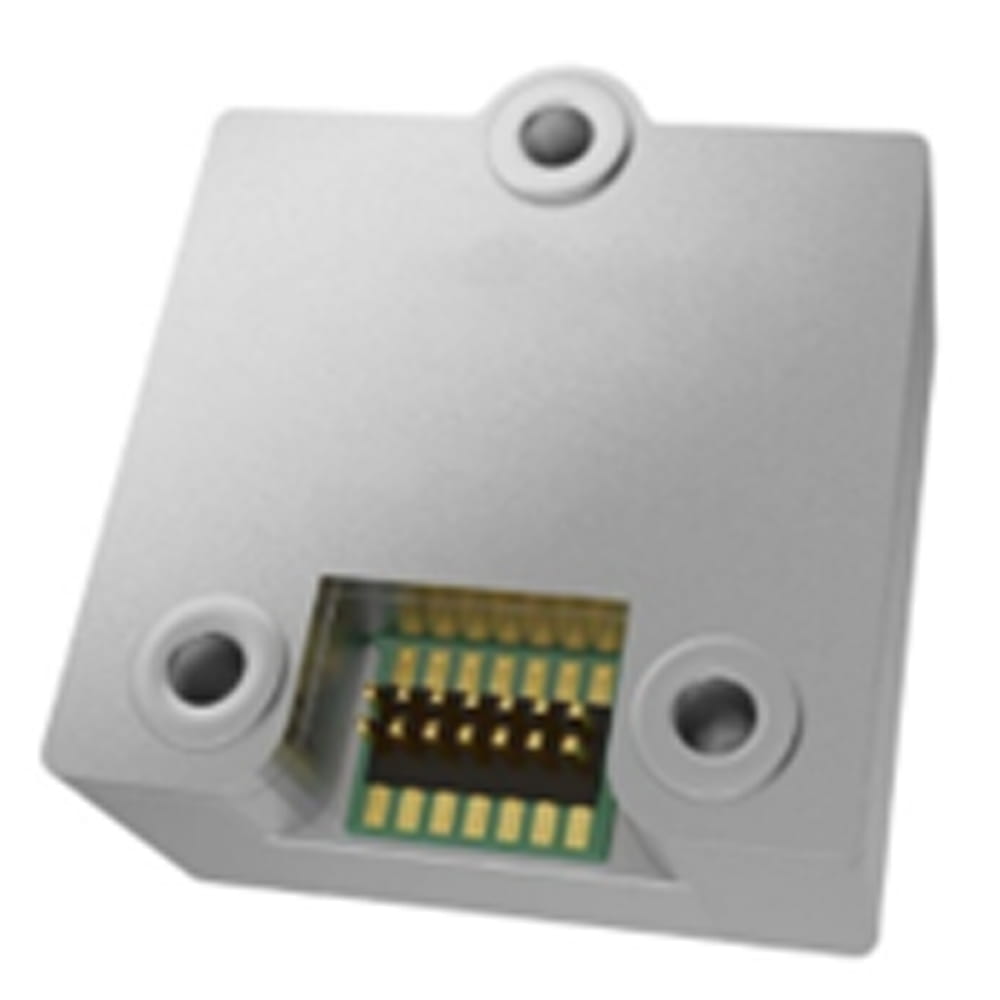
تقوم أجهزة الاستشعار من سلسلة U4200 بنقل البيانات من خلال واجهات مختلفة مثل RS232 و RS422 و CAN، ولديها تكوينات مستخدم غنية.
يمكن مزامنة سلسلة U4200 مع النظام من خلال التشغيل الخارجي، ويمكنها أيضًا تحقيق محاذاة زمنية مع الأنظمة الخارجية مثل أجهزة الرادار والكاميرات من خلال وظيفة الإخراج المتزامن.
يمكن للحاسوب العلوي متعدد الوظائف (واجهة المستخدم الرسومية) أن يساعد في تقييم المنتج بسرعة، وتشمل هذه الوظائف على سبيل المثال لا الحصر تكوين الوحدة النمطية، وعرض البيانات، وترقية البرامج الثابتة، وتسجيل البيانات، وما إلى ذلك.
رقم القطعة، :
U4200الطلب (الحد الأدنى للكمية) :
1سلسلة المنتجات والمعايير
| دقة الموقف | حالة | U4200-A | U4200-B | وحدة |
| الميل (±90 درجة) / الدوران (±180 درجة) (ثابت) | 0.05 (اسمي)، 0.07 (أقصى) | ° | ||
| الميل (±90 درجة) / الدوران (±180 درجة) (ديناميكي) | 0.05 (اسمي) 0.07 (أقصى) | |||
| الانحراف (±180 درجة) الانحراف الثابت لمدة ساعتين (6 درجات حرية) ① | 0.1 | |||
| المساعدة المغناطيسية (AHRS) ② | 2 (اسمي)، 3 (كحد أقصى) | |||
| خطأ دوران الانحراف (6 درجات حرية) (دوران أقل من 100 درجة/ثانية) 3 | <0.5 (اسمي)، 1 (كحد أقصى) | |||
| ملحوظة: ① الوحدة ثابتة أفقياً لمدة ساعتين. ② بعد المعايرة المغناطيسية الأرضية، يجب تهيئة المنتج في وضع AHRS عندما لا يكون هناك تداخل في المجال المغناطيسي في المنطقة المحيطة. ③ يدور القرص الدوار باستمرار لمدة 10 دورات، وتتراكم أخطاء زاوية التوجيه. |
||||
| جيروسكوب | حالة | U4200-A | U4200-B | وحدة |
| نطاق القياس | ±300 | °/s | ||
| دقة | 16 | قليل | ||
| الخطأ الخطي ① | 300 درجة مئوية/ثانية -40 درجة مئوية -110 درجة مئوية | ±0.15 (اسمي)، ±0.3 (أقصى) | °/s | |
| 100 درجة مئوية/ثانية -40 درجة مئوية -110 درجة مئوية | ±0.01 (اسمي)، ±0.04 (أقصى) | |||
| خطأ المحور المتقاطع | ±0.15 | % | ||
| عرض نطاق ترددي 3 ديسيبل | 235 (اسمياً)، 250 (كحد أقصى) | Hz | ||
| معدل أخذ العينات | 1000 | Hz | ||
| كثافة الضوضاء | XY: 0.0004 Z: 0.0006 |
°/s/√Hz | ||
| عدم استقرار الانحياز الصفري ② | ألان، 1σ | 0.3 | °/ساعة | |
| استقرار الانحياز الصفري | 10 ثوانٍ، 1σ | 0.5 | °/ساعة | |
| قابلية التكرار بدون انحياز | 1σ | 0.8 | °/ساعة | |
| المشي العشوائي بزاوية ③ | ألان 1σ | XY: 0.015 Z: 0.025 |
°/√h | |
| درجة حرارة كاملة بدون انحياز | -40-85 درجة مئوية | XY: 0.25 Z: 0.03 |
°/s | |
| حساسية مقياس التسارع (جميع المحاور الثلاثة) | لإدخال الجاذبية الثابتة | 0.00075 | °/s/g | |
| ملحوظات: ①: الخطأ الخطي هو أقصى انحراف ضمن نطاق محدد عن خط الانحدار الأمثل المحدد بالقيم المقاسة. يستخدم نموذج الانحدار الخطي الأمثل طريقة المربعات الصغرى للمطابقة الخطية. ٢: القيمة التي تم الحصول عليها بقسمة الحد الأدنى لقيمة تباين ألان على ٠.٦٦٤. أثناء القياس، يتم استخدام إعداد مرشح تمرير منخفض بتردد ١٣ هرتز ومعدل أخذ عينات ٢٠٠ هرتز، ويجب أن يكون هناك وقت استقرار لمدة ١٥ دقيقة قبل بدء جمع البيانات لضمان الاستقرار الحراري الكامل. ③: المشي العشوائي الزاوي هو مصطلح ضوضاء بيضاء يتم تقديره من انحراف ألان عند ثابت زمني τ = 1 ثانية. |
||||
| مقياس التسارع | حالة | U4200-A | U4200-B | وحدة |
| نطاق القياس | 16 | g | ||
| دقة | 16 | قليل | ||
| تحيز صفري | 2 | mg | ||
| الخطأ الخطي ① | 300 درجة مئوية/ثانية -40 درجة مئوية -110 درجة مئوية | ±3 (اسمي)، ±15 (كحد أقصى) | mg | |
| 100 درجة مئوية/ثانية -40 درجة مئوية -110 درجة مئوية | ±0.5 (اسمي)، ±1 (أقصى) | |||
| خطأ المحور المتقاطع | ±0.15 | % | ||
| عرض نطاق ترددي 3 ديسيبل | 210 (اسمي)، 235 (كحد أقصى) | Hz | ||
| معدل أخذ العينات | 1000 | Hz | ||
| كثافة الضوضاء | 0.0008 | م/ث²√هرتز | ||
| عدم استقرار الانحياز الصفري ② | ألان، 1σ | 10 | ug | |
| استقرار الانحياز الصفري | 10 ثوانٍ، 1σ | 30 | ug | |
| قابلية التكرار بدون انحياز | 1σ | 40 | ug | |
| المشي العشوائي بزاوية ③ | ألان 1σ | 0.03 | م/ث/√س | |
| درجة حرارة كاملة بدون انحياز | -40-85 درجة مئوية | 0.5 (اسمي)، 2 (كحد أقصى) | mg | |
| ملحوظات: ①: الخطأ الخطي هو أقصى انحراف ضمن نطاق محدد عن خط الانحدار الأمثل المحدد بالقيم المقاسة. يستخدم نموذج الانحدار الخطي الأمثل طريقة المربعات الصغرى للمطابقة الخطية. ٢: القيمة التي تم الحصول عليها بقسمة الحد الأدنى لقيمة تباين ألان على ٠.٦٦٤. أثناء القياس، يتم استخدام إعداد مرشح تمرير منخفض بتردد ١٣ هرتز ومعدل أخذ عينات ٢٠٠ هرتز، ويجب أن يكون هناك وقت استقرار لمدة ١٥ دقيقة قبل بدء جمع البيانات لضمان الاستقرار الحراري الكامل. ③: المشي العشوائي الزاوي هو مصطلح ضوضاء بيضاء يتم تقديره من انحراف ألان عند ثابت زمني τ = 1 ثانية. |
||||
| مقياس المغناطيسية | حالة | U4200-A | U4200-B | وحدة |
| يتراوح | ±20 | جاوس | ||
| معدل أخذ العينات | 200 | HZ | ||
| الخطية (أفضل خط مستقيم ملائم Fs=2G) | 0.1 | Fs% | ||
| مستشعر درجة الحرارة | حالة | U4200-A | U4200-B | وحدة |
| يتراوح | -40 ~ +85 | ℃ | ||
| خطأ الإزاحة | ±1 | K | ||
| الميكانيكا/البيئة | U4200-A / U4200-B | وحدة | ||
| مزود الطاقة | 4.8 ~ 36 | V | ||
| استهلاك الطاقة | 400 | mW | ||
| درجة حرارة التشغيل | -125 | ℃ | ||
| وقت البدء ① | 2 | s | ||
| مقاس | 44.8 × 38.6 × 18.5 | mm | ||
| وزن | 55 | g | ||
| مادة الغلاف وعملية تصنيعه | سبائك الألومنيوم المصنعة باستخدام تقنية CNC | |||
| براغي التجميع | M3 | |||
| مضاد للاهتزاز | 1.0 مم (10 هرتز - 58 هرتز) و ≤ 20 جم (58 هرتز - 600 هرتز) | |||
| الصدمة (المدة) <1 مللي ثانية) | 2000 | g | ||
| معيار الحماية من الأسلحة النارية | مقاومة للماء بمعيار IP68 | |||
| اختبار السقوط | السقوط الحر ثلاث مرات على منصة تجريبية بارتفاع 75 سم | |||
| صدمة حرارية | ارفع درجة الحرارة من -40 إلى 85 درجة مئوية خلال ساعة واحدة، 5 مرات | |||
| ملحوظات: ① يشير وقت بدء التشغيل إلى الوقت الذي يستغرقه النظام للإغلاق وإخراج بيانات صحيحة. خلال هذه الفترة، يجب إبقاء الوحدة ثابتة. |
||||
| واجهة المستخدم | حدود | حالة | مين | طبيعي | الأعلى | وحدة |
| RS232 | معدل الباود ① | 9600 | 115200 | 921600 | bps | |
| البداية | 1 | قليل | ||||
| طول البيانات | 8 | أجزاء | ||||
| توقف | 1 | قليل | ||||
| مجموع التحقق | لا أحد | قليل | ||||
| معدل الإطارات الناتج ② | 0 | 100 | 1000 | Hz | ||
| مقاومة الدخل | RS-232 | 3 | 5 | 7 | kΩ | |
| مقاومة الخرج | 300 | 10 ملايين | Ω | |||
| يستطيع | معدل الباود ③ | 125 | 500 | 1000 | كيلوبت في الثانية | |
| معدل الإطارات الناتج ④ | 5 | 100 | 200 | Hz | ||
| مقاومة الدخل⑤ | مع مقاومة 120 أوم | 120 | Ω | |||
| بدون مقاومة 120 أوم | 19 | 30 | 52 | kΩ | ||
| RS422 | معدل الباود | 9600 | 115200 | 921600 | bps | |
| البداية | 1 | قليل | ||||
| طول البيانات | 8 | أجزاء | ||||
| توقف | 1 | قليل | ||||
| مجموع التحقق | لا أحد | قليل | ||||
| معدل الإطارات الناتج | 0 | 100 | Hz | |||
| مقاومة الدخل⑤ | مع مقاومة 120 أوم | 120 | Ω | |||
| بدون مقاومة 120 أوم | 48 | kΩ | ||||
| دبوس الزناد | الجهد المنطقي ⑥ | عالي | 2 | V | ||
| قليل | 0.6 | V | ||||
| تأخير | من لحظة التفعيل إلى نقل البيانات | 800 | us | |||
| ملحوظات: ① في حال الحاجة إلى إجراء تعديلات، يرجى الرجوع إلى دليل التعليمات والبرمجة. ② يدعم المستشعر إخراج البيانات بترددات 1 و 5 و 10 و 50 و 200 و 250 و 500 و 1000 هرتز. ③ في حال الحاجة إلى إجراء تعديلات، يرجى الرجوع إلى دليل التعليمات والبرمجة. ④ يدعم المستشعر إخراج البيانات بترددات 5 و 10 و 50 و 100 و 200 هرتز. ⑤ افتراضياً، لا يوجد مقاوم 120 أوم متصل ⑥ يرجى الرجوع إلى فصل وظيفة المزامنة ودليل التعليمات والبرمجة لمعرفة توقيت التشغيل والتكوين. |
||||||
عملية الإنتاج
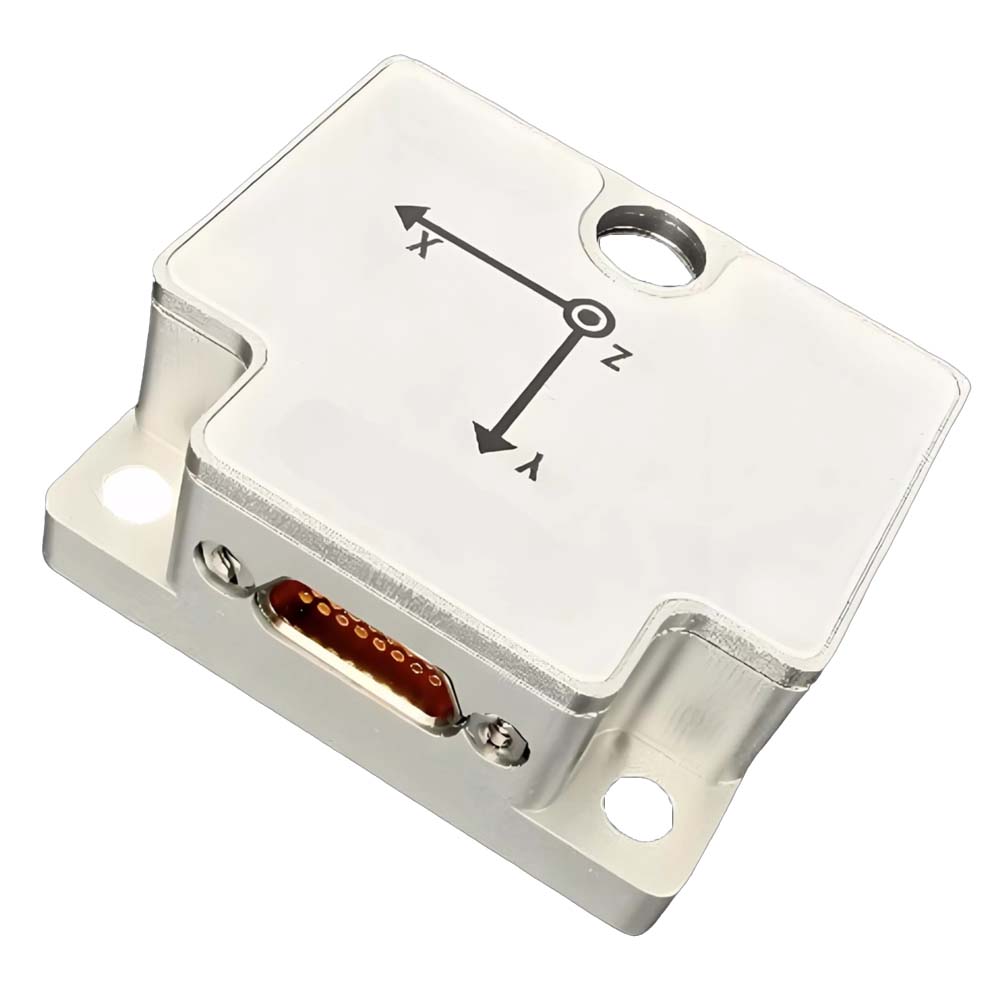
أبعاد المنتج

سيناريوهات التطبيق



التعليمات
س1. ما هو استخدام جهاز U4200؟
U4200 هو مستشعر MEMS IMU / VRU / AHRS عالي الدقة مصمم لتحديد الاتجاه والتحكم في المسار وتثبيت المنصة والأجهزة تحت الأرض والروبوتات غير المأهولة منخفضة السرعة والأجهزة الدقيقة وآلات البناء.
س2. ما هي المنافذ التي يدعمها جهاز U4200؟
يدعم جهاز U4200 واجهات الاتصال RS232 و RS422 و CAN، مع خيارات تكوين غنية للمستخدم لتكاملات النظام المختلفة.
س3. ما هي بروتوكولات الاتصال المتاحة؟
يدعم المستشعر بروتوكولات متعددة بما في ذلك البروتوكول الثنائي، وCANopen، وModbus، كما تدعم واجهة CAN أيضًا J1939.















Xml سياسة الخصوصية مدونة خريطة الموقع
حقوق الطبع والنشر @ شركة مايكرو ماجيك جميع الحقوق محفوظة.
 الشبكة المدعومة
الشبكة المدعومة



 بالعربية
بالعربية