كيفية اختيار وحدة قياس القصور الذاتي MEMS المناسبة للروبوتات الصناعية وتطبيقات الأتمتة
يركز استخدام وحدات قياس القصور الذاتي بتقنية الأنظمة الكهروميكانيكية الدقيقة (MEMS IMU) في المجال الصناعي بشكل أساسي على التحكم عالي الدقة في الحركة، ومراقبة المعدات، والإنتاج الآلي. ويتطلب اختيار وحدة قياس القصور الذاتي المناسبة بتقنية MEMS في التطبيقات الصناعية دراسة شاملة للدقة، والقدرة على التكيف مع البيئة، وتوافق الواجهات، والفعالية من حيث التكلفة.
يركز استخدام وحدة القياس بالقصور الذاتي MEMS IMU في مجال الروبوتات الصناعية والأتمتة بشكل أساسي على التغذية الراجعة والتحكم في وضعية الروبوت، وتوجيه المركبات الموجهة آليًا (AGV/AMR)، ومراقبة الاهتزازات وتشخيصها. في مجال التغذية الراجعة والتحكم في الوضعية، توفر وحدة MEMS IMU معلومات آنية عن الوضعية (الميل، والدوران، والانعراج) والسرعة الزاوية لمفاصل الروبوت، أو أدواته الطرفية، أو المنصات المتحركة، مما يحقق تحكمًا دقيقًا في الحركة، وتخطيطًا دقيقًا للمسار، ومنعًا للاصطدام. أما في مجال توجيه المركبات الموجهة آليًا (AGV/AMR)، فتُدمج وحدة MEMS IMU مع مستشعرات سرعة العجلات، وتقنية LiDAR، والمستشعرات البصرية لتوفير وظيفة الملاحة التقديرية. فعند فقدان المرجع الخارجي مؤقتًا، تستطيع وحدة IMU الحفاظ على تحديد الموقع والاتجاه على المدى القصير، مما يُحسّن من متانة واستمرارية الملاحة. وفي مجال مراقبة الاهتزازات وتشخيصها، تُثبّت وحدة MEMS IMU على مفاصل الروبوت، أو الهياكل الرئيسية، أو المحركات لمراقبة طيف الاهتزاز وسعته أثناء التشغيل، وذلك لأغراض الصيانة التنبؤية، والكشف المبكر عن الأعطال مثل تآكل المحامل، وعدم التوازن، وعدم المحاذاة.

تركز متطلبات وحدات القياس بالقصور الذاتي الكهروميكانيكية الدقيقة (MEMS IMU) في مجال الروبوتات الصناعية والأتمتة بشكل أساسي على الجوانب التالية:
يُعدّ استقرار الانحياز الصفري أهم مؤشر للأداء الثابت، وانخفاضه يعني أن دقة تقدير الوضعية (الميل، والدوران، والانعراج) على المدى الطويل أمر بالغ الأهمية. عندما تعمل الروبوتات لفترات طويلة أو عندما تتنقل المركبات الموجهة آليًا بدقة، يُعدّ انخفاض انحراف الانحياز الصفري أساسيًا لضمان دقة الوضعية. يتطلب استقرار الانحياز الصفري للجيروسكوبات عادةً <1 درجة مئوية/ساعة، وتتطلب التطبيقات المتطورة <0.5 درجة/ساعة. يتطلب مؤشر استقرار الانحياز الصفري لمقاييس التسارع <١ ملغ. بالإضافة إلى ذلك، يعكس الانحراف العشوائي الزاوي خصائص الضوضاء البيضاء لمخرج الجيروسكوب، والتي تحدد معدل زيادة خطأ تكامل الزاوية بمرور الوقت. يُعدّ انخفاض الانحراف العشوائي الزاوي أساسًا لتحقيق وضعية عالية الدقة، لا سيما في فترة زمنية قصيرة، وهو أمر بالغ الأهمية للتحكم في حركة الروبوتات عالية السرعة وعالية الديناميكية.
لنأخذ على سبيل المثال سلسلة MEMS IMU U6300 و U7000 عالية الأداء من شركة Micro-Magic Inc:
بند الفهرس | U6300-A | U6300-D | U7000 | وحدة | |
الجيروسكوب | عدم استقرار الانحياز | 0.5 | 0.1 | 0.1 | °/ساعة |
المشي العشوائي | 0.02 | 0.05 | º/√hr | ||
استقرار الانحياز الصفري (10 ثوانٍ) | 1 | 3 | °/ساعة | ||
معدل | عدم استقرار الانحياز | 10 | 15 | μg | |
المشي العشوائي | 0.02 | 0.01 | م/ث/√س ساعة | ||
استقرار الانحياز الصفري (10 ثوانٍ) | 100 | 100 | μg | ||

تتميز الروبوتات الصناعية بتردد حركة مفاصلها العالي، وقد يكون تردد الاهتزاز في نهاية ذراعها أعلى من ذلك. لذا، يُعدّ عرض النطاق الترددي العالي ضروريًا لالتقاط الحركة والاهتزاز السريعين بدقة. عادةً، يجب أن يتجاوز عرض النطاق الترددي 100 هرتز، بل قد يصل إلى مئات الهرتز. إضافةً إلى ذلك، يمكن للروبوتات أن تبدأ وتتوقف بسرعة، أو أن تصطدم، أو أن تسير المركبات الموجهة آليًا (AGVs) على طرق غير مستوية. قد يؤدي التحميل الزائد إلى تشوه البيانات نتيجة التشبع، ولذلك، يجب أن تتمتع وحدات القياس بالقصور الذاتي (IMUs) بتقنية MEMS بنطاق واسع كافٍ. عادةً، قد تتطلب الجيروسكوبات نطاقًا يتراوح بين ± 300 درجة/ثانية و± 2000 درجة/ثانية أو أعلى، بينما قد تتطلب مقاييس التسارع نطاقًا يتراوح بين ± 2g و± 50g أو أعلى.
لنأخذ المنتجات U3600 و U5000 و U6488 من شركة Micro-Magic Inc كمثال:
بند الفهرس | U3600 | U5000 | U6488 | وحدة | |
الجيروسكوب | يتراوح | ±2000 | ±400 | ±450 | °/s |
عرض نطاق ترددي 3 ديسيبل | 116 | 250 | 400 | Hz | |
معدل | يتراوح | ±12 | ±10 | ±20 | g |
عرض نطاق ترددي 3 ديسيبل | 145 | 100 | 268 | Hz | |

البيئة الصناعية مليئة بالاهتزازات (المحركات، التروس، سيور النقل، إلخ). يجب أن تكون وحدة القياس بالقصور الذاتي (IMU) قادرة على كبح تداخلات هذه الاهتزازات وتجنب إخراج بيانات خاطئة (خاصةً الجيروسكوبات الحساسة للاهتزازات الخطية والتي تُنتج أخطاءً حساسة لتسارع الجاذبية). يتطلب ذلك تصميمًا ميكانيكيًا جيدًا (مثل التخميد) وخوارزميات متقدمة لمعالجة الإشارات. يجب ضمان عدم تلف المعدات وعدم تدهور أدائها بشكل دائم عند التعامل مع التصادمات غير المتوقعة أو السقوط أو عمليات الصدمات القوية. عادةً ما تحتاج هذه الوحدات إلى تحمل صدمات تصل إلى آلاف من تسارع الجاذبية الأرضية.
لنأخذ المنتجات U3500 وU3600 وU3700 من شركة Micro-Magic Inc كمثال:
بند الفهرس | U3500 | U3600 | U3700 |
مضاد للاهتزاز(g,غرف) | 1.0 مم (10 هرتز - 58 هرتز) و ≤ 20 جم (58 هرتز - 600 هرتز) | ||
صدمة(g) | 2000، <1 مللي ثانية | ||
حماية البيئة | توجيه RoHS 2011/65/EU | ||
التوافق الكهرومغناطيسي | توجيه LVD 2014/35/EU | ||
اختبار السقوط | السقوط الحر ثلاث مرات على منصة تجريبية بارتفاع 75 سم | ||
صدمة حرارية | ارفع درجة الحرارة من -40 إلى 85 درجة مئوية خلال ساعة واحدة، 5 مرات | ||

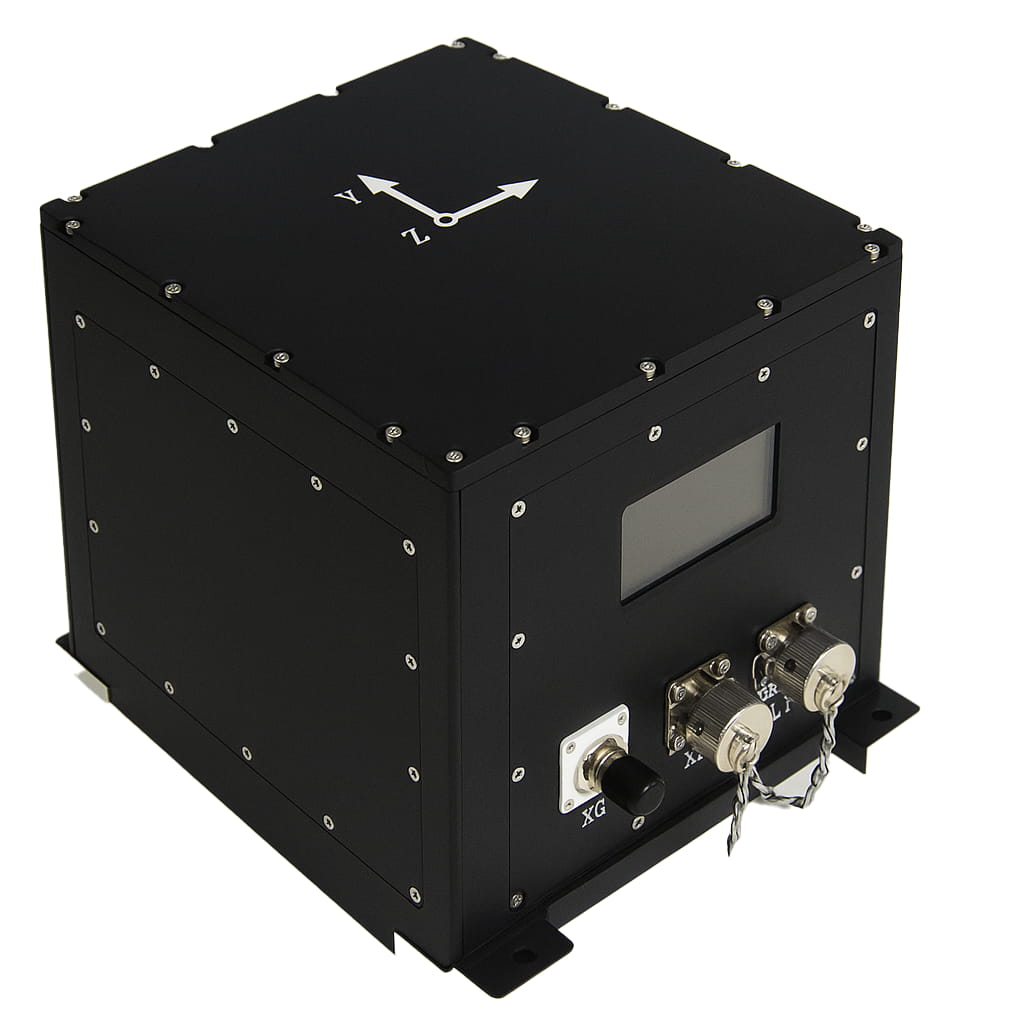
تُستخدم وحدات القياس بالقصور الذاتي (IMUs) المصنعة بتقنية الأنظمة الكهروميكانيكية الدقيقة (MEMS) على نطاق واسع في المجالات الصناعية والعسكرية نظرًا لصغر حجمها وخفة وزنها وانخفاض استهلاكها للطاقة. يسمح تصغير حجمها بتضمينها بسهولة في مفاصل الروبوتات، ونهايات الوصلات، وهياكل المركبات الموجهة آليًا (AGVs) المدمجة، وحتى داخل الأدوات دون أي تكلفة إضافية أو تغييرات تصميمية كبيرة. يقلل التصميم خفيف الوزن من تأثير وحدة القياس بالقصور الذاتي على قدرة التحميل وأداء الحركة للروبوتات، لا سيما الروبوتات عالية السرعة والدقة أو الروبوتات التعاونية. كما يُطيل انخفاض استهلاك الطاقة لوحدة القياس بالقصور الذاتي عمر بطارية الروبوتات المتنقلة وعقد الاستشعار اللاسلكية، مما يقلل من استهلاك الطاقة الإجمالي ومتطلبات تبديد الحرارة للنظام.
لنأخذ المنتجات U300 و U3500 و U3000 من شركة Micro-Magic Inc كمثال:
بند الفهرس | U300-B | U3500 | U3000 | وحدة |
الأبعاد | 22.4*22.4*7.4 | 22*22*10 | 59.6*59*23.5 | mm |
وزن | 7 | 8 | 120 | g |
استهلاك الطاقة | 0.3 | 0.3 | 0.6 | W |
الجهد االكهربى | 3.3 | 3.3 | 5 | V |

تحتاج وحدات القياس بالقصور الذاتي MEMS الصناعية إلى تحقيق مستوى عالٍ من التوازن على هذه المؤشرات الصارمة من أجل تلبية المتطلبات الشاملة للروبوتات الصناعية الحديثة وأنظمة الأتمتة من حيث دقة الإدراك والموثوقية والأداء في الوقت الحقيقي والمتانة.

Xml سياسة الخصوصية مدونة خريطة الموقع
حقوق الطبع والنشر @ شركة مايكرو ماجيك جميع الحقوق محفوظة.
 الشبكة المدعومة
الشبكة المدعومة



 بالعربية
بالعربية