المنتج: نظام الملاحة المتكامل GNSS/MEMS INS
الميزات الرئيسية:
مع تطور أجهزة القصور الذاتي MEMS، تحسنت دقة جيروسكوبات MEMS ومقاييس تسارع MEMS تدريجيًا، مما أدى إلى تقدم سريع في تطبيق ممس الإضافية. ومع ذلك، فإن التعزيز في دقة أجهزة MEMS بالقصور الذاتي لم يكن كافيًا لتلبية متطلبات الدقة العالية المتزايدة لـ MEMS INS. وبالتالي، أصبح تحسين دقة MEMS INS من خلال خوارزميات تعويض الأخطاء وغيرها من الأساليب محورًا لأبحاث MEMS INS.
لتعزيز أداء MEMS INS، اكتشف الباحثون طرقًا مختلفة لتقليل الأخطاء في هذه الأنظمة. هناك أربعة طرق رئيسية لتقليل أخطاء MEMS INS:
معايرة وتعويض معلمات خطأ المستشعر: يتضمن ذلك استخدام النمذجة الرياضية والأدوات التجريبية لتحفيز أخطاء المستشعر، ومعايرة الأخطاء الحتمية بشكل منهجي على مستوى النظام، ومن ثم تعويض هذه الأخطاء من خلال خوارزميات التنقل بالقصور الذاتي لتحسين الأداء العام.
تقنية تعديل الدوران: من خلال تطبيق مخططات تعديل الدوران المناسبة، يمكن تغيير أخطاء المستشعر بشكل دوري دون الاعتماد على مصادر معلومات خارجية. يعمل هذا التعويض التلقائي للأخطاء في خوارزمية التنقل على منع تأثير أخطاء المستشعر على MEMS INS.
تقنية تكرار الأجهزة بالقصور الذاتي: نظرًا لانخفاض تكلفة أجهزة استشعار القصور الذاتي MEMS، يمكن تنفيذ تصميمات التكرار. يمكن للتكرار في أجهزة الاستشعار أن يقلل بشكل فعال من تأثير الأخطاء العشوائية على MEMS INS، وبالتالي تحسين الأداء.
دمج مصادر المعلومات الخارجية: استخدام تصفية كالمان للتنقل المتكامل لمنع تراكم أخطاء MEMS INS.
ستقدم هذه المقالة أيضًا الطريقة الرابعة، وهي نموذج الملاحة المتكامل الأكثر عملية والأكثر بحثًا على نطاق واسع - نظام الملاحة المتكامل GNSS/MEMS INS.
MEMS INS هو نوع من نظام الحساب الميت الذي يقيس الحالة النسبية من لحظة أخذ العينات السابقة إلى لحظة أخذ العينات الحالية. ولا يعتمد على الإشارات الصوتية أو الضوئية أو الكهربائية للقياس، مما يجعله شديد المقاومة للتدخل الخارجي والخداع. إن استقلاليته وموثوقيته تجعله نظام ملاحة أساسي لمختلف شركات النقل مثل الطائرات والسفن والمركبات. يسرد الشكل 1 أداء INS بدرجات مختلفة.

الشكل 1: أداء INS بدرجات مختلفة.
يوفر نظام MEMS INS معدل تحديث عاليًا ويمكنه إخراج معلومات الحالة الشاملة، بما في ذلك الموقع والسرعة والموقف والسرعة الزاوية والتسارع، مع دقة تنقل عالية على المدى القصير. ومع ذلك، يتطلب نظام MEMS INS مصادر معلومات إضافية لتهيئة الموقع والسرعة والموقف، ويتراكم خطأ الملاحة بالقصور الذاتي مع مرور الوقت، لا سيما في نظام INS التكتيكي والتجاري.
يمكن لمجموعة GNSS/MEMS INS تحقيق المزايا التكميلية لكلا النظامين: توفر GNSS دقة مستقرة طويلة المدى ويمكن أن تقدم قيمًا أولية للموضع والسرعة، وتصحيح الأخطاء المتراكمة في MEMS INS من خلال التصفية. وفي الوقت نفسه، يمكن لـ MEMS INS تحسين معدل تحديث مخرجات الملاحة GNSS، وإثراء أنواع مخرجات معلومات الحالة، والمساعدة في اكتشاف أخطاء مراقبة GNSS والقضاء عليها.
يعكس النموذج الأساسي لتكامل GNSS/MEMS INS العلاقة الوظيفية بين المعلومات المرصودة من أجهزة الاستشعار (IMU وأجهزة الاستقبال) ومعلمات الملاحة الحاملة (الموقع والسرعة والموقف)، بالإضافة إلى الأنواع والنماذج العشوائية لأخطاء قياس أجهزة الاستشعار. . ويجب وصف معلمات الملاحة الخاصة بالناقل في نظام إحداثي مرجعي محدد.

الشكل 2 النموذج الأساسي للملاحة المتكاملة Gnssmems Ins
تتضمن مشاكل الملاحة عادةً نظامين إحداثيين أو أكثر: تقيس أجهزة الاستشعار بالقصور الذاتي حركة الحامل بالنسبة إلى الفضاء بالقصور الذاتي، في حين يتم وصف معلمات الملاحة للحامل (الموقع والسرعة) عادةً في نظام إحداثيات ثابت على الأرض من أجل الفهم البديهي. تشتمل أنظمة الإحداثيات شائعة الاستخدام في الملاحة المتكاملة GNSS/INS على نظام الإحداثيات بالقصور الذاتي المتمركز حول الأرض، ونظام الإحداثيات الثابتة المتمحور حول الأرض، ونظام الإحداثيات الجغرافية المحلية، ونظام إحداثيات الجسم.
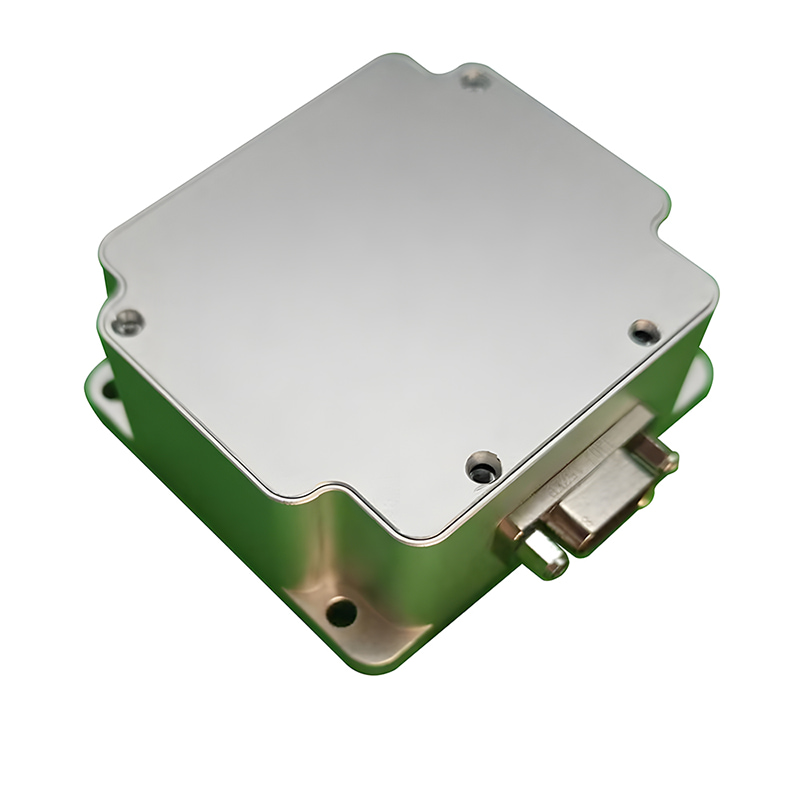
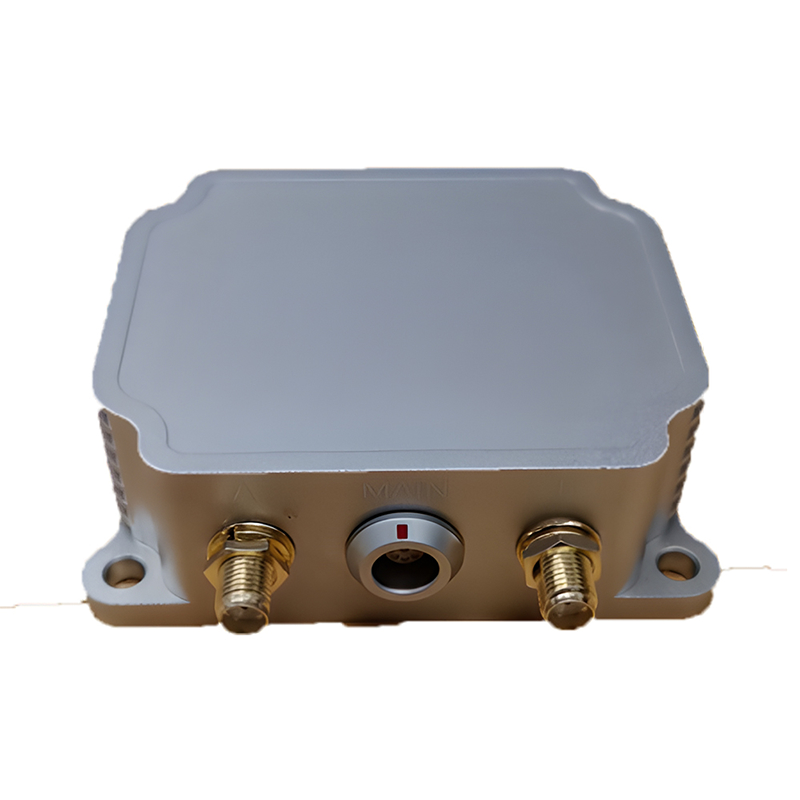
حاليًا، نضجت خوارزميات تكامل GNSS/MEMS INS في التنقل المطلق، وظهرت العديد من المنتجات عالية الأداء في السوق. على سبيل المثال، تعد نماذج MEMS INS الثلاثة التي تم إطلاقها حديثًا من شركة Micro-Magic Inc، الموضحة في الصورة أدناه، مناسبة للتطبيقات في الطائرات بدون طيار، ومسجلات الطيران، والمركبات الذكية بدون طيار، وتحديد المواقع على الطريق والتوجيه، واكتشاف القنوات، والمركبات السطحية غير المأهولة، والمركبات تحت الماء. المركبات.

الشكل 3: أنظمة GNSS/MEMS INS الثلاثة التي تم إطلاقها حديثًا بواسطة شركة Micro-Magic Inc

Xml سياسة الخصوصية المدونة خريطة الموقع
حقوق النشر
@ شركة مايكرو ماجيك كل الحقوق محفوظة.
 دعم الشبكة
دعم الشبكة



 بالعربية
بالعربية