تلعب أنظمة الملاحة بالقصور الذاتي (INS) دورًا حاسمًا في تكنولوجيا القيادة الذاتية، لا سيما في معالجة أوجه القصور في أجهزة الاستشعار الأخرى مثل نظام تحديد المواقع العالمي (GPS) والكاميرات وتقنية الليدار. فهي توفر معلومات مستمرة وعالية التردد وغير مضطربة عن حالة الحركة، وتُعد أحد المكونات الأساسية لإدراك وتحديد موقع القيادة الذاتية.
تتمثل الوظيفة الأساسية لنظام الملاحة بالقصور الذاتي في القيادة الذاتية في استشعار حالة حركة المركبة. يقيس النظام الموقع ثلاثي الأبعاد والسرعة وزاوية الميل (بما في ذلك الدوران والانحراف والالتفاف) للمركبة. تتميز وحدة القياس بالقصور الذاتي (IMU)، باعتبارها المستشعر الأساسي في نظام الملاحة بالقصور الذاتي، بتردد تحديث بيانات عالٍ جدًا (عادةً ما يزيد عن 100 هرتز)، متجاوزةً بذلك بكثير تردد نظام تحديد المواقع العالمي (1-10 هرتز) والكاميرا/الليدار (10-30 هرتز)، ويمكنها رصد التغيرات الديناميكية اللحظية للمركبة.
عادةً ما تفقد أنظمة الملاحة ذاتية القيادة إشارات نظام تحديد المواقع العالمي (GPS) أو تصبح غير موثوقة، مما يتسبب في انقطاع إشارة نظام تحديد المواقع العالمي أو تدهورها الشديد، كما هو الحال في الأنفاق ومواقف السيارات تحت الأرض وتحت الجسور المرتفعة حيث يتم حجب إشارات الأقمار الصناعية تمامًا؛ في الوديان الحضرية والمناطق ذات المباني الشاهقة، تنعكس إشارات نظام تحديد المواقع العالمي بشدة وتتعرض لتداخل متعدد المسارات، مما يؤدي إلى انخفاض كبير أو حتى فشل في دقة تحديد الموقع؛ تحت الغابات الكثيفة، قد تحجب الأوراق أيضًا إشارات الأقمار الصناعية.
في هذه المرحلة، تلعب أنظمة الملاحة بالقصور الذاتي (INS) دورًا هامًا. فمن خلال التقدير الملاحي، وبالاعتماد على الموقع والاتجاه الدقيقين المعروفين في اللحظة السابقة، يتم دمج التسارع والسرعة الزاوية المقاسين بواسطة وحدة القياس بالقصور الذاتي (IMU) لحساب الإزاحة النسبية الحالية وتغير اتجاه المركبة، وبالتالي حساب الموقع والاتجاه الجديدين. وهذا يضمن استمرارية تحديد الموقع. وبفضل توفير معلومات عالية التردد عن الاتجاه، حتى في حال جودة إشارة نظام تحديد المواقع العالمي (GPS)، يصعب على أجهزة الاستشعار الأخرى توفير معلومات عالية التردد والدقة عن الاتجاه (الدوران، الميل، الانعراج) التي توفرها أنظمة الملاحة بالقصور الذاتي بمفردها.
يقارن الجدول التالي مؤشرات أداء الملاحة لنظام الملاحة المتكامل I4500 أثناء الملاحة بمساعدة الأقمار الصناعية مقابل سيناريوهات فقدان إشارة الأقمار الصناعية.
أداء نظام I4500
حدود | مؤشر (RMS) | تعليقات | |
دقة تحديد الاتجاه | نظام تحديد المواقع العالمي المزدوج | 0.1 درجة | خط الأساس 2 متر |
نظام تحديد المواقع العالمي أحادي الاتجاه | 0.2 درجة | الحاجة إلى المناورة | |
دقة الاحتفاظ بفشل نظام تحديد المواقع العالمي عبر الأقمار الصناعية | 0.2 درجة مئوية/دقيقة |
| |
سلوك دقة | نظام GNSS صالح | 0.1 درجة |
|
دقة الاحتفاظ بفشل نظام تحديد المواقع العالمي عبر الأقمار الصناعية | 0.2 درجة مئوية/دقيقة |
| |
وضع VG (مدة تعطل نظام تحديد المواقع العالمي غير محدودة، ولا يوجد تسارع) | 2° |
| |
دقة تحديد المواقع الأفقية | نظام GNSS صالح | 1.2 متر | نقطة واحدة |
2 سم + 1 جزء في المليون | RTK | ||
عطل في نظام تحديد المواقع العالمي (GNSS) (60 ثانية) | 20 مترًا |
| |
تعتمد أنظمة القيادة الآلية الحديثة تقنية دمج البيانات الحسية بشكل كامل. ويُعد نظام الملاحة بالقصور الذاتي (INS) عنصراً أساسياً في إطار عمل هذا الدمج.
⚪ من خلال دمج نظام الملاحة العالمي عبر الأقمار الصناعية (GNSS) مع نظام الملاحة بالقصور الذاتي (INS)، يتشكل نظام ملاحة متكامل GNSS/INS، وهو النظام الأكثر شيوعًا ونضجًا. يوفر نظام GNSS تحديدًا دقيقًا للموقع واستقرارًا طويل الأمد، إلا أن تحديثاته بطيئة وعرضة للتداخل. بينما يوفر نظام INS معلومات عالية التردد ومستمرة عن الحركة النسبية والاتجاه، ولكنه يعاني من خطأ تراكمي (انحراف). يستفيد مرشح كالمان من مزايا كلا النظامين لتصحيح الأخطاء بشكل متبادل؛ حيث يُصحح نظام GNSS انحراف نظام INS، بينما يوفر نظام INS تحديدًا مستمرًا للموقع وإخراجًا سلسًا لبيانات GNSS عند تعطل نظام GNSS. ثانيًا، يُحسّن هذا النظام المدمج الدقة والمتانة بشكل عام، وتكون دقة وموثوقية النظام المدمج أعلى بكثير من دقة وموثوقية كل من نظام GNSS أو نظام INS على حدة.
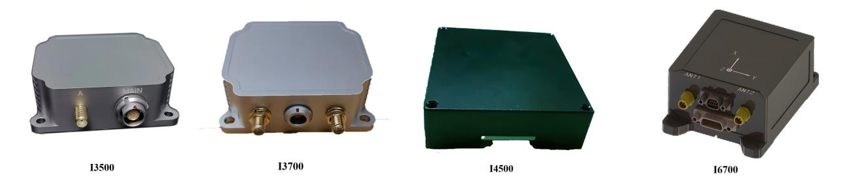
⚪ من خلال التكامل مع عداد السرعة، يوفر عداد السرعة معلومات عن سرعة العجلات (السرعة، المسافة المقطوعة)، مما يساعد في تصحيح أخطاء نظام الملاحة بالقصور الذاتي (INS) في تقدير السرعة، خاصةً عند قيادة المركبة في خط مستقيم. يوضح الجدول التالي مؤشرات أداء نظام الملاحة المتكامل I3700 من إنتاج شركة مايكرو ماجيك. حتى في حالة فقدان إشارة الأقمار الصناعية، يمكن تحقيق دقة قياس عالية بفضل دمج خوارزمية نظام الملاحة بالقصور الذاتي (INS) مع عداد سرعة العجلات.
مؤشرات دقة الملاحة I3700
وقت القفل الضائع | وضع التنقل | دقة تحديد الموقع | دقة السرعة | دقة الميل/الدوران | دقة تحديد الاتجاه |
3s | قم بتوصيله بعداد المسافة | 1 سم | 0.03 م/ث | 0.1 درجة | 0.2 درجة |
10 ثوانٍ | 1m | 0.1 متر/ثانية | 0.1 درجة | 0.2 درجة | |
الستينيات | 6m | 0.1 متر/ثانية | 0.2 درجة | 0.35 درجة |
⚪ من خلال التكامل مع تقنية SLAM البصرية/LiDAR، يمكن لبيانات IMU عالية التردد توفير تنبؤات الحركة لمعالجة البيانات البصرية أو بيانات LiDAR، مما يقلل من التعقيد الحسابي لمطابقة الصور أو مطابقة سحابة النقاط، ويحسن الأداء في الوقت الفعلي والموثوقية (خاصة في الحركة السريعة أو البيئات ذات النسيج الضعيف). تُعد معلومات الوضع الدقيقة (الميل، الانحدار) التي يوفرها نظام الملاحة بالقصور الذاتي (INS) بالغة الأهمية لتحليل العلاقات الهندسية لصور الكاميرا أو سحابات نقاط LiDAR بشكل صحيح على المنحدرات والطرق الوعرة.
حالات التطبيق
على سبيل المثال، يمكن لهذا النظام دمج العديد من أجهزة الاستشعار المساعدة مثل نظام تحديد المواقع العالمي عبر الأقمار الصناعية (GNSS) وعداد المسافات ومقياس المغناطيسية، وما إلى ذلك، وتوفير وظيفة تصحيح الاتجاه بدقة للمركبات في سيناريوهات تشغيل مختلفة.
طريقة تصحيح الاتجاه I6700
وظيفة | حالة | تعليقات |
اتجاه الهوائي المزدوج لنظام GNSS | تمكين الهوائي المزدوج | مناسب للمساحات المفتوحة |
محاذاة الحركة | طائرة、السيارات والبحرية | مناسبة للبيئات التي تتطلب مناورة واسعة، بسرعة حامل لا تقل عن 3 أمتار/ثانية. |
GPSTrue Heading | تفعيل نظام تحديد المواقع العالمي (GPS) | مناسب للمساحات المفتوحة |
محاذاة التسارع | وضع المروحية | تسارع لا يقل عن 2.5 متر/ثانية مربعة خلال ثانيتين |
التوجيه المغناطيسي | تمكين البوصلة المغناطيسية | بيئة المجال المغناطيسي مستقرة نسبياً |
أطلقت شركة مايكرو ماجيك منتجات أنظمة الملاحة بالقصور الذاتي عالية الدقة
يُعد نظام الملاحة بالقصور الذاتي (INS) الركيزة الأساسية لنظام تحديد المواقع في القيادة الذاتية. فهو يوفر معلومات مستمرة وعالية التردد وغير مضطربة عن حالة حركة المركبة واتجاهها، ما يجعله تقنيةً رئيسيةً لضمان استمرارية تحديد المواقع، وقوتها، وقدرتها على الاستجابة السريعة. خاصةً في الظروف الصعبة التي يفقد فيها نظام تحديد المواقع العالمي (GPS) الاتصال (مثل الأنفاق، والشوارع الحضرية الضيقة)، يحافظ نظام الملاحة بالقصور الذاتي على قدرته على تحديد المواقع من خلال التقدير الملاحي، وهو عنصر لا غنى عنه في تعزيز السلامة. وعلى الرغم من أن خطأه التراكمي المتأصل يتطلب دمجه بشكل وثيق مع أجهزة استشعار أخرى (مثل نظام الملاحة العالمي عبر الأقمار الصناعية، وأجهزة استشعار سرعة العجلات، والرؤية، والليدار) لتصحيحه، إلا أنه في إطار دمج البيانات من أجهزة استشعار متعددة، يعمل نظام الملاحة بالقصور الذاتي كمركز محوري، مما يُحسّن بشكل كبير دقة وموثوقية وأداء نظام تحديد المواقع بأكمله. ومع تطور تقنية وحدة القياس بالقصور الذاتي (مثل تحسين دقة الجيروسكوب الكهروميكانيكي الدقيق وتصغير حجم جيروسكوبات الليزر ذات الحالة الصلبة) وتحسين خوارزميات الدمج، سيزداد دور نظام الملاحة بالقصور الذاتي أهميةً في القيادة الذاتية.

Xml سياسة الخصوصية مدونة خريطة الموقع
حقوق الطبع والنشر @ شركة مايكرو ماجيك جميع الحقوق محفوظة.
 الشبكة المدعومة
الشبكة المدعومة



 بالعربية
بالعربية