Key Points
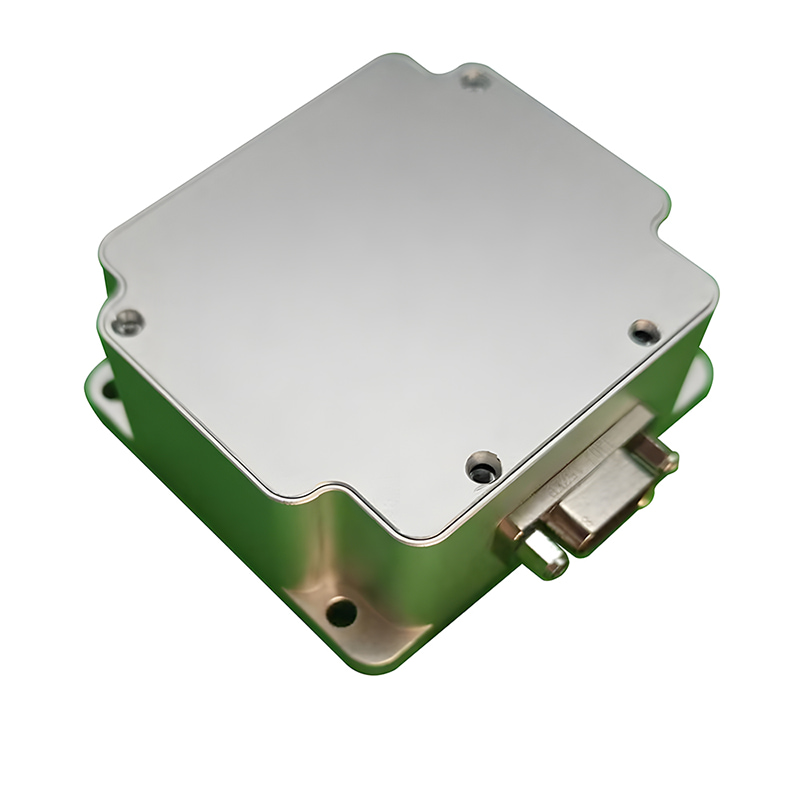
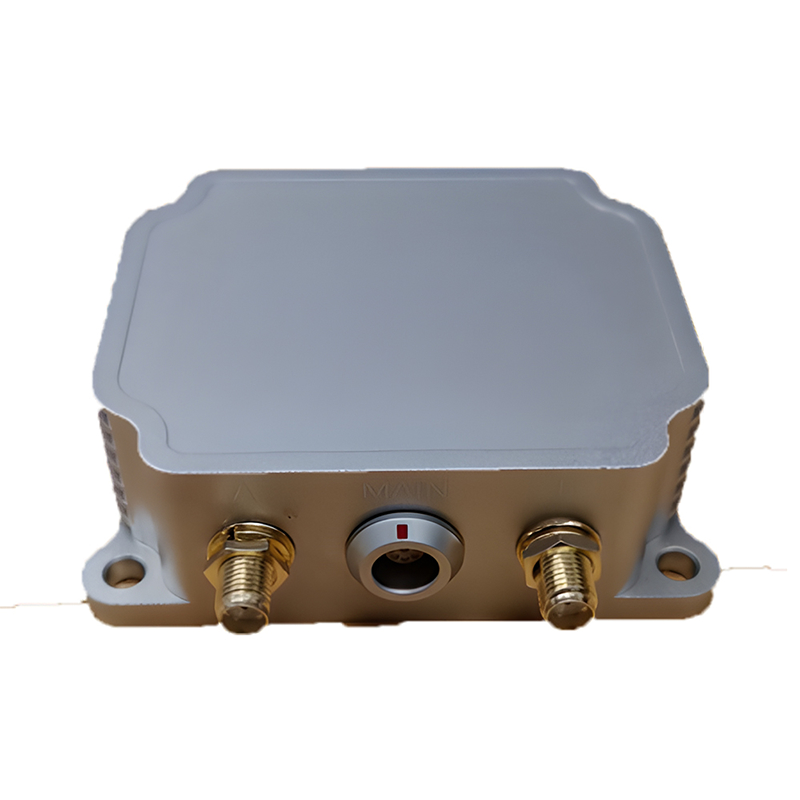
Product: Attitude and Heading Reference System (AHRS)
Features:
• Provides real-time attitude information (pitch, roll, yaw)
• Uses gyroscopes, accelerometers, and magnetometers for sensor fusion
• High precision and low latency for dynamic environments
• Uses algorithms like Kalman filter and complementary filter for data fusion
• Compact and lightweight, ideal for aerospace, marine, and autonomous applications
Applications:
• Aerospace: Monitors flight status and stability in aircraft and UAVs
• Autonomous Vehicles: Ensures stable navigation in self-driving cars
• Marine: Tracks attitude for underwater vehicles and submarines
• AR/VR: Captures user head movements for immersive experiences
Advantages:
• High precision and reliability in real-time navigation
• Reduces dependency on manual monitoring and traditional methods
• Easily integrates with other navigation systems like GPS
• Works in various environmental conditions (extreme temperatures, vibrations, etc.)
• Low power consumption and efficient for extended use in dynamic settings
The Attitude and Heading Reference System (AHRS) is a device widely used in aerospace, unmanned vehicles, marine exploration, and other precision navigation fields. Its primary function is to provide real-time attitude information (such as pitch, roll, and yaw) by measuring the acceleration and angular velocity of the aircraft or spacecraft, enabling precise navigation and control.
The core components of AHRS typically include gyroscopes, accelerometers, and magnetometers. These sensors provide real-time data to sense the motion state of the vehicle. The gyroscope provides angular velocity information, the accelerometer measures acceleration, and the magnetometer helps calibrate the heading angle.
In practical applications, AHRS needs to use sensor fusion algorithms to combine data from different sensors and provide accurate attitude estimation. Common algorithms include Kalman Filtering and Complementary Filtering. These algorithms help correct sensor errors and provide reliable heading and attitude information.
One of the core tasks of AHRS is attitude estimation. Attitude refers to the orientation of an object relative to the Earth's reference coordinate system, usually represented by three angles: pitch, roll, and yaw. There is a close mathematical relationship between these angles and the output signals from inertial sensors.
Let the accelerometer and angular velocity sensor outputs be represented by  , and
, and  ,respectively. The estimation of attitude angles can be computed using the following formulas:
,respectively. The estimation of attitude angles can be computed using the following formulas:
 and the rate of change of attitude angles
and the rate of change of attitude angles  is given by
is given by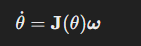
where 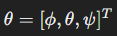 represents the yaw (heading angle), pitch angle, and roll angle, and
represents the yaw (heading angle), pitch angle, and roll angle, and  is the Jacobian matrix describing the mapping from angular velocity to attitude angles.
is the Jacobian matrix describing the mapping from angular velocity to attitude angles.
For the acceleration data from the accelerometer  ,the following equation combines the acceleration data with attitude angles:
,the following equation combines the acceleration data with attitude angles: ,where
,where is the rotation matrix that describes the rotation between the body frame and the world frame. This matrix allows the conversion of acceleration data from the world coordinate system to the body coordinate system.
is the rotation matrix that describes the rotation between the body frame and the world frame. This matrix allows the conversion of acceleration data from the world coordinate system to the body coordinate system.
In practice, AHRS systems use complementary filters or Kalman filters to fuse data from different sensors. The basic idea of complementary filtering is to leverage the low-frequency data from the accelerometer and the high-frequency data from the gyroscope to smooth the attitude estimation process and reduce noise.
The formula for the complementary filter is:
1.Where  is the current estimated attitude,
is the current estimated attitude, is the angular velocity from the gyroscope,
is the angular velocity from the gyroscope, is the attitude estimated from the accelerometer,
is the attitude estimated from the accelerometer, is the fusion coefficient, and
is the fusion coefficient, and  is the time interval.
is the time interval.
The Kalman filter, on the other hand, uses prediction and update steps to optimize attitude estimation, providing more accurate results in dynamic environments.
With the continuous development of technology, the application fields of AHRS have expanded. Below are several typical applications:
With advancements in microelectronics, sensor technologies, and data processing capabilities, the performance and application prospects of AHRS systems continue to improve. In the future, AHRS is expected to make significant progress in the following areas:
As a crucial component of navigation and positioning technologies, AHRS plays an increasingly important role in various fields. With the continuous advancement of technology, AHRS will provide stronger support for precise navigation, driving the development of automation and intelligence. By gaining a deeper understanding of AHRS’s working principles and its application prospects, we can better grasp the opportunities and challenges brought by this technology.

Xml سياسة الخصوصية المدونة خريطة الموقع
حقوق النشر
@ شركة مايكرو ماجيك كل الحقوق محفوظة.
 دعم الشبكة
دعم الشبكة



 بالعربية
بالعربية